

Currently, GPS technology (Global Positioning System - a global satellite navigation system) is an essential part of modern technological infrastructure. Using the appropriate equipment, we are able to get the exact time and location of objects in any point of the globe. GPS is widely used to create accurate geographical and geodetic maps for navigation on land, air and maritime transport, to determine the coordinates of unmanned aerial vehicles, tracking of mobile emergency beacons, the migration of fish, animals and so on.
For modeling, prototyping, design, development or testing in series production of GPS-devices, you must create a natural environment with a GPS-signal, exactly the same signal from both satellites the GPS-system. There are two main ways to get a GPS-Signal:
- real GPS-signal from the GPS satellites, which are located at a height 20000 kilometers from the earth's surface (so-called Live Sky method)
- simulated GPS-signal, which generates a table or floor portable GPS-signal generator.
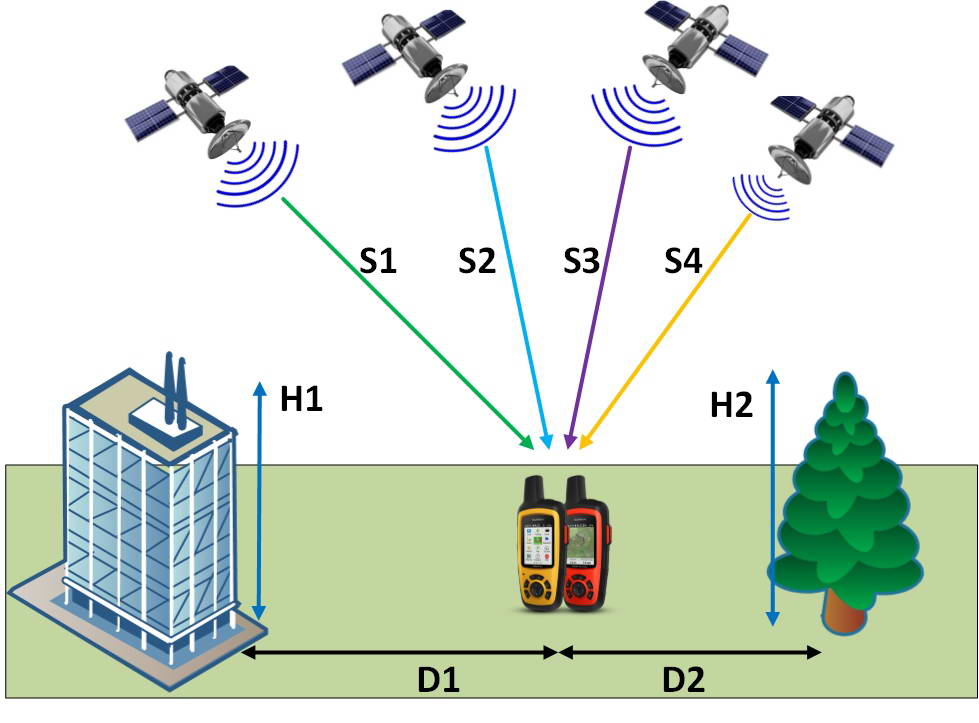 |
| Figure 1 - work GPS-enabled device near high-rise buildings |
Let's consider these two methods. The first method is the easiest, but because of the constant movement of the satellites of the navigation system, it is almost impossible to test the GPS device several times with the same characteristics of the GPS signal. Moreover, it is extremely difficult to create conditions for receiving an ideal or distorted GPS signal. For example, to achieve the maximum accuracy of determining the coordinates and time, all manufacturers of GPS equipment recommend placing the antenna at a distance D ≥ H from a high-altitude object (building, tree, etc.), where H is the height of the object, (Figure 1). Obviously, in conditions of the city, it is practically impossible to fulfill this condition. In addition, the GPS-device does not receive the ideal signal from satellites (as in figure 1), but a signal that is subject to interference, reflection and significant weakening due to high-rise buildings, bridges, terrain (Figure 2). We also need a GPS signal, the parameters and characteristics of which we can freely and easily change. Unfortunately, it is almost impossible to influence the characteristics of a real GPS signal. But this possibility has a stationary GPS-generator. It simulates a GPS signal, in which you can: set the number of satellites (from 1 to 12); Set the transmitter power of each satellite; Simulate the motion of satellites in orbit, thereby creating a movement of test objects; Specify any coordinates of the location of the object on the surface of the earth and in the air; Simulate the movement of an object with any speed and any coordinates and so on.
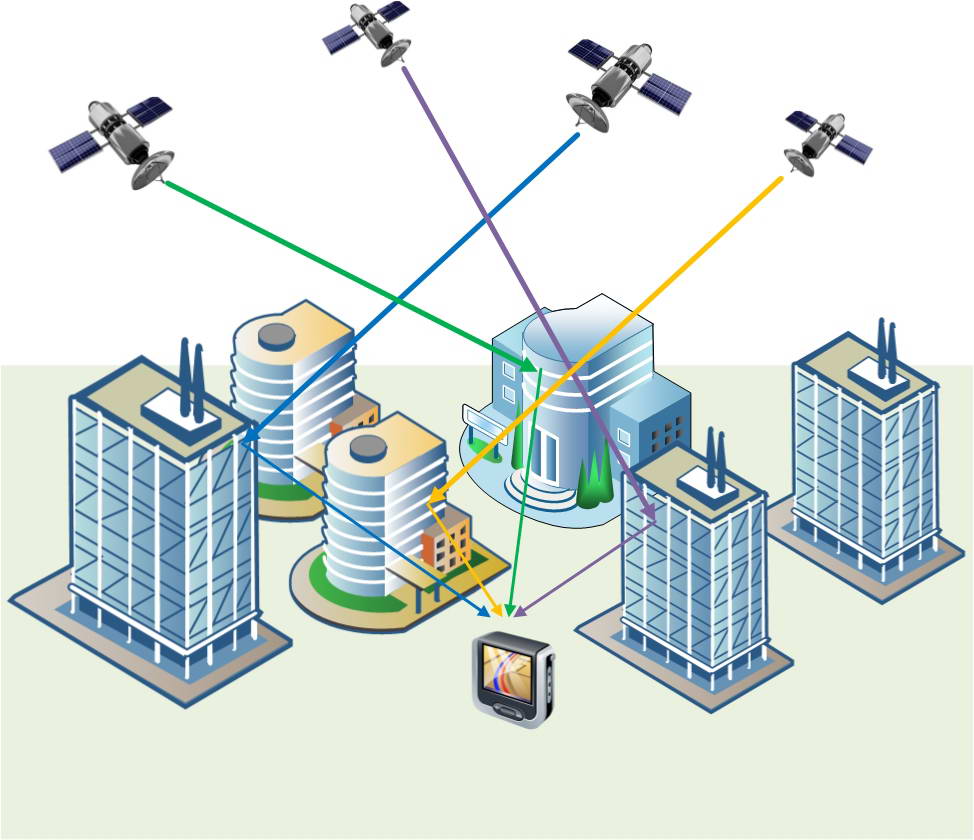 |
| Figure 2 - interference, multipath and attenuation of the GPS-signal |
In order to understand what signals the GPS generator generates, consider the basics of the GPS system (figure 1). The GPS system consists of 24 satellites, each of which makes a full revolution around the globe for 12 hours and transmits information to the ground on several carrier frequencies. From any point of the globe at this time, you can see a maximum of 12 satellites. Currently, most consumer GPS devices and microcircuits use the GPS carrier frequency L1 = 1575,42 MHz. At this frequency, each satellite transmits navigational messages that contain information about the location of this satellite in orbit (ephemeris - ephemeris), the location of the remaining GPS satellites (almanac - almanac) and very accurate GPS time. The GPS-device, having received this data from satellites and having determined the distances S1, S2, S3, S4 (figure 1), calculates its coordinates and time in the GPS system with very high accuracy.
GPS-generator GPS-Gen-1001, which is developed by our company, simulates GPS-Signal carrier frequency GPS L1. The signal generator is identical signals of satellites navigation GPS / GLONASS system. In addition, GPS-Gen-1001 generator makes it possible to change the characteristics of the GPS-signal, for example, to simulate the interference and weaken the signal to dynamically change the coordinates, simulating the movement of GPS-enabled device. This creates all the necessary conditions for study, research, development, testing and test GPS-devices and systems based on them in a closed room.
Generator GPS-Gen-1001 has the following main features:
- generates a signal on one of the following carrier frequencies: GPS L1 = 1575.42 MHz, L2 = 1227.60 MHz, GLONASS L1 = 1602 MHz, L2 = 1246 MHz;
-
changes the signal power from -145 dBm to + 10 dBm;
-
continuously generates GPS-signal within 24 hours;
-
generates a signal from 1 to 12 satellites simultaneously;
-
It simulates the change of the coordinates and GPS-time receiver;
-
It simulates the GPS-receiver motion along a predetermined path (while the GPS-receiver remains stationary);
-
simulates the complex trajectories of the GPS receiver (for example, with several points of the trajectory in which the direction of travel changes.) The coordinates of these points are set by the user);
-
GPS-receiver simulates movement at different speeds;
-
change the level of each satellite signal within ± 30 dBm relative to the reference level;
-
generates time frames TAI format;
-
It generates an additional digital output synchronized to GPS time frames IRIG-B, 1588-2008;
- It generates an additional digital output pulses PPS (Pulse Per Second).
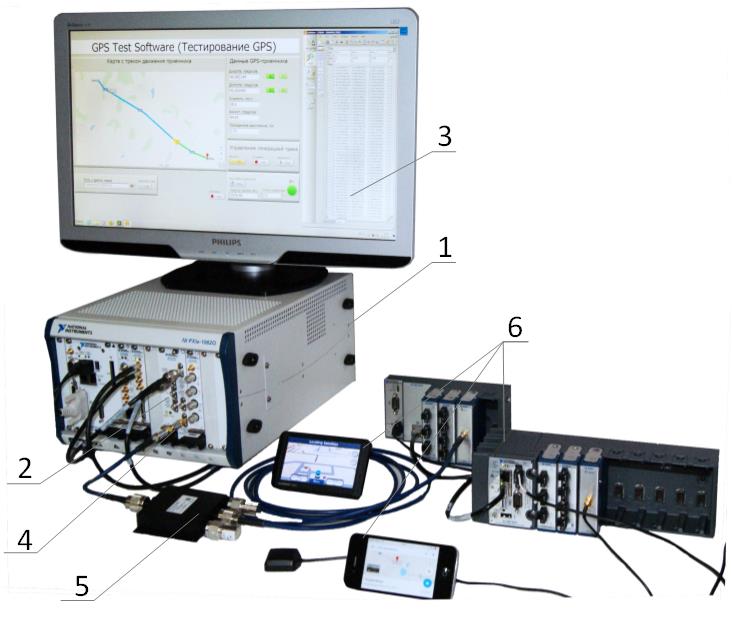 |
| Figure 3 - Generator GPS-Gen-1001 |
Figure 3 shows the GPS signal generator GPS-Gen-1001 20-01. It consists of a PXI chassis with a controller (1) and an RF vector generator. All operating modes of the generator and setting up its functions go through our software GPS Test Software (3). The high-frequency output of the GPS generator is connected to the tested GPS devices (6) through an attenuator (4) and a GPS signal splitter (5).
Also, GPS-Gen-1001 generator allows you to define the characteristics of GPS-receivers. It is necessary both for understanding and studying how they work, and to determine compliance with these performance specifications of your project. Perhaps to test the following key characteristics of GPS-enabled device:
- sensitivity (at the signal level from -130 dBm and below) - determines at what minimum signal level the GPS device will be able to determine the time and position. The lower its value, the more difficult the reception conditions may be for a GPS device (for example, the device antenna is located near a high-rise building and the GPS signal is very weak).
-
the minimum value of the signal-to-noise ratio at which the GPS-device can determine position and time (Carrier / Noise by up to 28 32 dB-Hz). The lower its value, the more stable GPS-device operates at high levels of electromagnetic interference (e.g., interference with the relatively weak (-130 dBm) GPS-signal and a relatively strong (-100 ...- 70 dBm) LTE-network signal) .
- minimum time before determining the position after turning on the GPS device (TTFF - Time To First Fix) - determines how quickly the device will determine its time and position after turning on. For example, this characteristic is very important for GPS-navigators of land transport, whose task is to inform the driver immediately after switching on which section of the road he is on;
- Position Accuracy and Repeatability - error in determining the coordinates of the GPS device. The lower its value, the more precisely the device determines the position.
Based on the GPS-Gen-1001 generator, you can create a high-frequency complex that can generate or analyze signals from 250 kHz to 2,7 GHz. In the range of these frequencies are devices that work on the standards of Wi-Fi, ZigBee, GSM, EDGE / GPRS, UMTS, LTE, WiMAX, Bluetooth. By analogy with GPS, such a complex generates a signal that is completely identical to the signal with which the HF device operates. Thus, it is possible to design, prototype, test the above devices.
Thus, GPS-Gen-1001-1001 generator can be used for the complete simulation of real operating conditions, GPS-enabled device in a closed room. If necessary, at the same time possible to operate with many GPS-units (up to several tens or even hundreds). All this greatly reduces the time, reduces risk and reduces the cost of errors in the prototyping, development, research, testing or mass production as the GPS-devices and systems based on GPS, as well as assemblies, equipped with GPS-chips.